About Me
Nathan Van Utrecht
Roboticist, Mechanical Engineer, and AI Researcher
I am an MS student in the Intelligent Systems, Robotics, and Controls program at UC San Diego. Currently my research interests are deep reinforcement learning, the sim-to-real gap, and dexterous manipulation.
Reinforcement Learning
Robotics
Computer Vision
Python
Dexterous Manipulation

Research
Xiaolong Wang's Lab
Co-Design with Real-World Data for Neural Joint Dynamics and Sim-to-Real Transfer
Nathan Van Utrecht, Prof. Xiaolong Wang
Xiaolong Wang's Lab — University of California San Diego
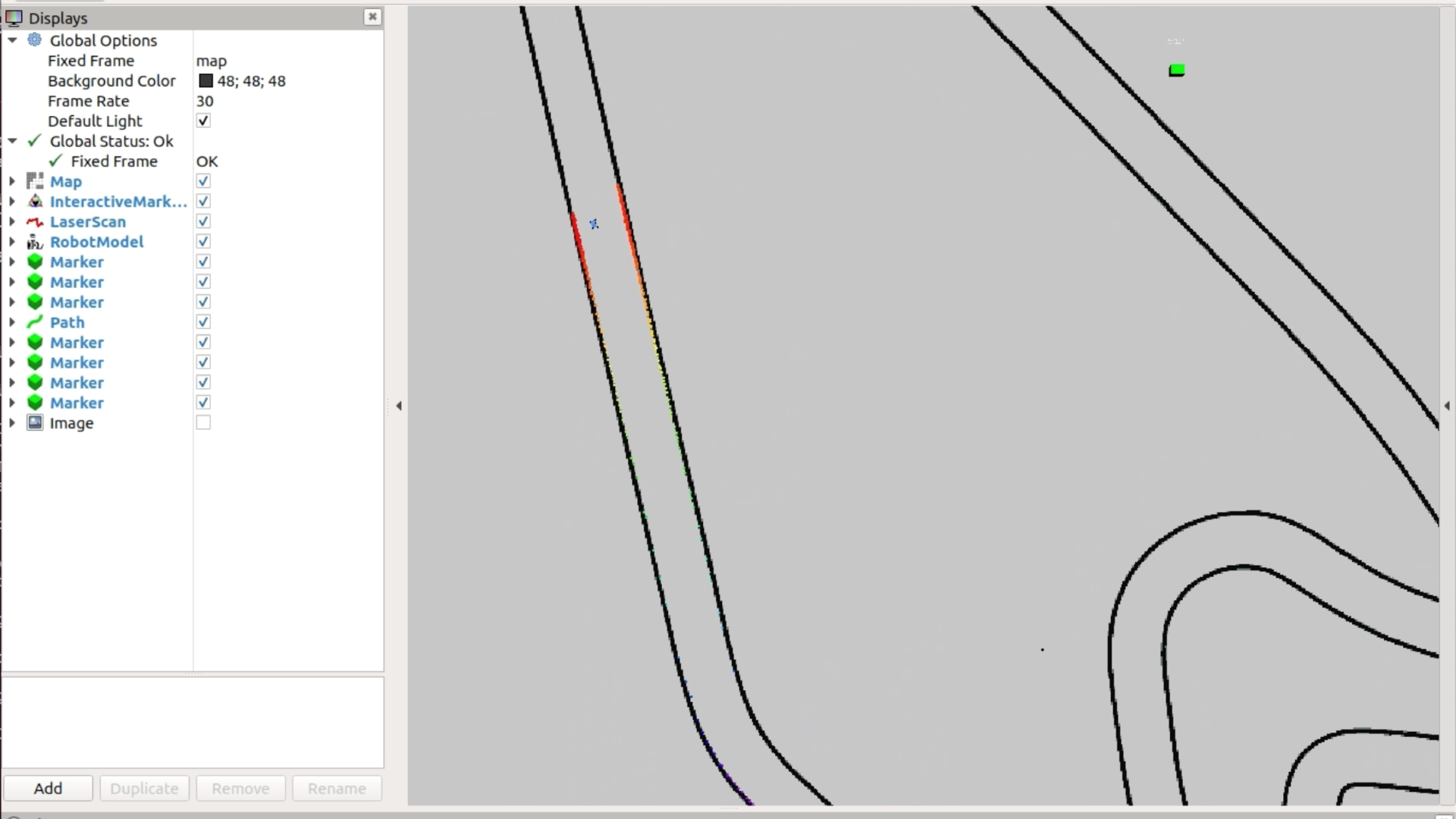
I recently joined Prof. Xiaolong Wang's lab at UC San Diego, where I am working on robot learning research. My current project involves leveraging real-world interaction data to improve the fidelity of simulation, with the goal of enabling more reliable transfer of learned policies to physical hardware.
Coordinated Systems Lab
From Demonstrations to Adaptations: Assessing Imitation Learning Robustness and Learned Reward Transferability
Nathan Van Utrecht, Dr. Cody Fleming
Coordinated Systems Lab — Iowa State University
This research explores how well AI agents, trained by watching expert demonstrations, can adapt to unexpected changes in their environment. I conducted a comprehensive study comparing three key imitation learning algorithms (BC, GAIL, and AIRL) across several simulated robotic tasks with altered physics and goals. The findings reveal the limitations of current methods in generalizing to novel situations and highlight the challenges of transferring a learned understanding of a task's objective.
Translational Artificial Intelligence Center
Investigating Model-Free vs Model-Based RL for Sim-to-Real Transfer
Nathan Van Utrecht, Dr. Cody Fleming
Translational Artificial Intelligence Center — Iowa State University
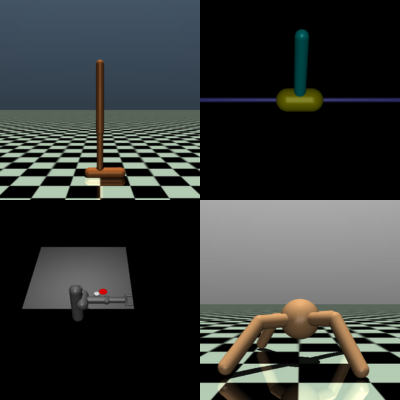
This research investigates the "sim-to-real" gap, where AI agents trained in simulation falter in the real world. I benchmarked model-based (SHAC) versus model-free (SAC, PPO) reinforcement learning algorithms on their ability to adapt to changes in physics and sensor noise in the classic Pendulum control task. My experiments revealed that the model-free SAC algorithm was not only more robust to these variations but also learned an expert policy five times faster than the other methods.
Industry

John Deere


Grace Technologies
Projects